

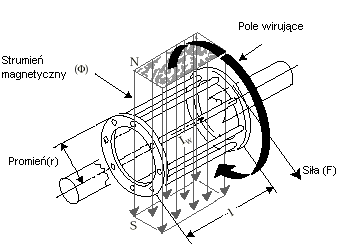
Trójfazowe silniki prądu przemiennego są elektromagnetycznymi przemiennikami energii zamieniającymi energię elektryczną na energię mechaniczną (praca silnikowa) i odwrotnie (praca prądnicowa) zgodnie z prawami indukcji elektromagnetycznej. Zasadę indukcji elektromagnetycznej można przedstawić na przykładzie przewodu poruszającego się w polu magnetycznym B, ruch ten powoduje indukowanie się siły elektromotorycznej SEM. Jeżeli przewód znajduje się w zamkniętym obwodzie, to popłynie prąd I. Kiedy przewód znajduje się w ruchu, działa na niego siła F, która jest prostopadle skierowana do kierunku pola magnetycznego.
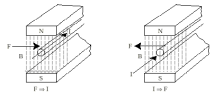
W czasie pracy silnikowej pole magnetyczne i prąd płynący w przewodach uzwojeń powodują ruch jego wirnika. Pole magnetyczne silnika, generowane w uzwojeniu stojana oddziaływuje poprzezsiły elektromagnetyczne na wirnik powodując jego ruch.
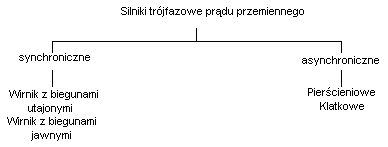
Silniki trójfazowe prądu przemiennego można podzielić na dwie główne grupy: silniki asynchroniczne i silniki synchroniczne. W obu typach silników zasada pracy stojana jest taka sama, ale wykonanie wirnika i jego ruch w stosunku do pola magnetycznego jest różny. W silniku synchronicznym prędkość wirowania wirnika i pola magnetycznego są takie same, a w silniku asynchronicznym prędkości te są różne.
Silniki asynchroniczne są najbardziej rozpowszechnione i nie wymagają praktycznie żadnej konserwacji. Z punktu widzenia napędu układów mechanicznych, są one najszerzej stosowane, ponieważ najłatwiej dobrać odpowiedni silnik do różnych zastosowań. Jest wiele rodzajów silników asynchronicznych, działających na tej samej zasadzie. Głównymi elementami silnika asynchronicznego są stojan i wirnik.
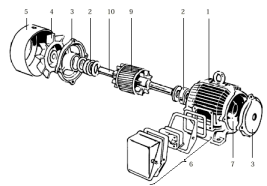
Stojan jest nieruchomą częścią silnika. Silnik składa się z obudowy (1), łożysk kulkowych (2) podpory wirnika (9), ułożyskowania (3) dla umiejscowienia łożysk w końcowej części obudowy stojana silnika, wentylatora (4) dla chłodzenia silnika i osłony wentylatora (5) jako ochrony przed obracającym się wentylatorem. Skrzynka podłączeniowa z zaciskami elektrycznymi (6) jest umiejscowiona na obudowie stojana silnika.
Rdzeń stojana (7) może być zbudowany z blach ferromagnetycznych o grubości (0,3 do 0,5 mm) podzielonych na sekcje. Te sekcje odizolowane od siebie stanowią trzy uzwojenia fazowe stojana.
Uzwojenia fazowe i rdzeń stojana indukują wirujące pole magnetyczne. Liczba par biegunów (lub biegunów) określa prędkość wirowania pola magnetycznego. Jeżeli silnik jest zasilany napięciem o określonej częstotliwości, to prędkość wirowania pola magnetycznego nazywana jest prędkością synchroniczną silnika n0.
Liczba par biegunów - p, liczba biegunów oraz prędkość synchroniczna silnika:

Pole magnetyczne indukuje się w szczelinie powietrznej między stojanem i wirnikiem. Po dołączeniu uzwojenia fazowego do zasilania indukuje się w silniku pole magnetyczne.
Zmienne pole magnetyczne silnika po dołączeniu jednej fazy:
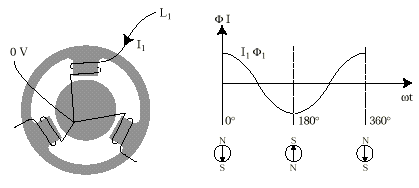
Położenie pola magnetycznego w rdzeniu stojana jest stałe, ale jego kierunek wirowania zmienia się. Prędkość, przy której występuje zmiana kierunku wirowania jest określona przez częstotliwość napięcia zasilania. Przy częstotliwości 50Hz kierunek wirowania zmienia się 50 razy na sekundę. Jeżeli dwa uzwojenia są połączone do odpowiedniej fazy w tym samym czasie, to indukują dwa pola magnetyczne w stojanie. W silniku dwubiegunowym, istnieje wówczas przesunięcie o 120 stopni między tymi dwoma polami. Wartości amplitudy tych pól są też przesunięte w czasie. Powoduje to indukowanie wirującego pola magnetycznego w stojanie. Pole to jest niesymetryczne dopóki nie podłączymy trzeciej fazy.
Niesymetryczne wirujące pole magnetyczne silnika po dołączeniu dwóch faz:
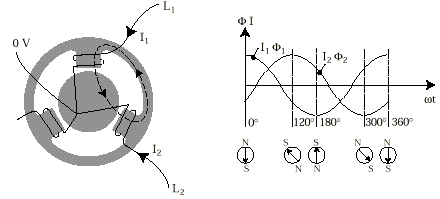
Trzy fazy generują trzy pola magnetyczne w stojanie, które są przesunięte o 120 stopni względem siebie.
Symetryczne pole magnetyczne silnika po dołączeniu trzech faz:
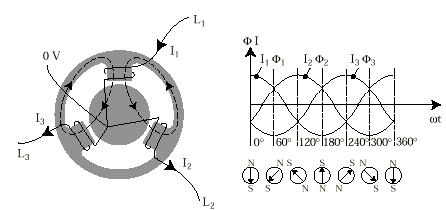
Gdy podłączymy uzwojenia stojana do trójfazowego napięcia zasilania to pola magnetyczne od poszczególnych uzwojeń wytworzą wirujące symetryczne pole magnetyczne, nazywane wirującym polem magnetycznym silnika. Amplituda wirującego pola jest stała i 1,5 razy większa od amplitudy pola pojedynczego uzwojenia. Prędkość wirowania tego pola wyraża się następującym wzorem:
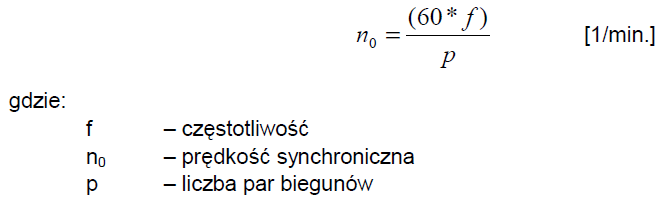
Jak wynika z powyższego wzoru prędkość synchroniczna silnika zależy od liczby par biegunów p i częstotliwości f napięcia zasilania.
Ponizszy rysunek przedstawia wykres wektorowy strumienia pola magnetycznego φ w trzech różnych okresach.
Wykresy wektorowe strumienia pola magnetycznego silnika w różnych okresach - amplituda tego pola jest stała:
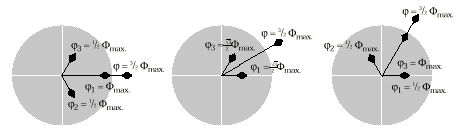
Odwzorowaniem wirującego pola jest wektor o odpowiedniej prędkości wirowania, który zakreśla okrąg. Jako funkcja czasu w układzie współrzędnych, wirujące pole ma kształt sinusoidy. Wirujące pole staje się przebiegiem o kształcie elipsy, jeżeli amplituda strumienia zmienia się w czasie wirowania wału silnika.
Wirnik (9) jest zamocowany na wale silnika (10), podobnie jak stojan, wykonany jest zwykle z cienkich blach ferromagnetycznych. Ze względu na dwa rodzaje wirników rozróżniamy dwa typy silników - silnik pierścieniowy i silnik klatkowy. Wirniki silników pierścieniowych mają tak jak stojan uzwojenia umieszczone w żłobkach, w których uzwojenie każdej fazy jest połączone z pierścieniem ślizgowym. Po zwarciu pierścieni, silnik będzie pracował jako silnik klatkowy.
Silniki klatkowe mają uzwojenia w postaci aluminiowych prętów i do tych prętów mocuje się pierścienie aluminiowe (powstaje coś w rodzaju klatki). Silnik klatkowy jest częściej używany niż silnik pierścieniowy. Obydwa silniki pracują na tej samej zasadzie. W niniejszej książce będzie opisywany tylko silnik klatkowy.
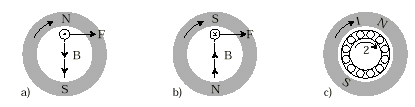
Kiedy klatka jest umieszczona w wirującym polu magnetycznym, strumień przecina pręt klatki wirnika. Strumień magnetyczny wywoła przepływ prądu wzbudzenia Iw w klatce wirnika, co spowoduje powstanie siły F.
Pole wirujące w wirniku silnika klatkowego:
Siła ta jest określona przez wartość indukcji B, prąd wzbudzenia Iw, długość l wirnika i kąt θ między siłą i indukcją.
F = B * Iw * l * sinθ
Jeżeli kąt θ jest równy 90⁰, to:
F = B * Iw * l
Następny biegun ma przeciwną polaryzację, powoduje to zmianę kierunku przepływu prądu. Ponieważ kierunek pola magnetycznego także się zmienia, kierunek działania siły F nie ulega zmianie.
Wykres wektorowy indukcji magnetycznej w pręcie klatki wirnika:
Kiedy cały wirnik znajduje się w wirującym polu, pręty klatki wirnika są poddawane działaniu sił, które obracają wirnik. Prędkość wirowania wirnika (2) nie jest równa prędkości wirowania pola (1). Jeżeli te prędkości byłyby równe to w prętach klatki nie będą indukować się żadne prądy.
W czasie normalnej pracy silnika prędkość wirnika n jest niższa niż prędkość wirującego pola magnetycznego n0, a poślizg s jest różnicą pomiędzy prędkością wirującego pola magnetycznego i prędkością wirnika:

Bezwzględny poślizg silnika często wyrażany jest w procentach prędkości synchronicznej i zwykle zawiera się w przedziale 4 - 11 procent.
.png)
Indukcja magnetyczna B zależna jest od strumienia magnetycznego φ płynącego przez przekrój poprzeczny A uzwojeń klatki wirnika. Przekształcając wzór określający indukcję B można wyznaczyć siłę F.
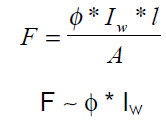
Siła F jest proporcjonalna do strumienia magnetycznego φ i prądu wzbudzenia Iw płynącego w przewodzie.
W klatce wirnika, pod wpływem pola magnetycznego indukuje się SEM. Siła elektromotoryczna SEM powoduje przepływ prądu wzbudzenia Iw w klatce wirnika. Pod wpływem tego prądu w klatce wirnika powstają siły, które powodują pojawienie się momentu M na wale silnika.
Charakterystyka momentu silnika asynchronicznego - siła x długość ramienia:
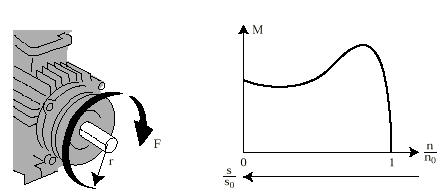
Na zależność między momentem i prędkością silnika duży wpływ ma budowa klatki wirnika. Moment na wale silnika jest wynikiem działania sił, które powodują ruch wału silnika.
Przykładowo: siła ta powstaje na kole zamachowym przymocowanym do wału. Moment ten jest zależny od siły F i promienia r koła zamachowego.
M = F * r
Praca wykonywana przez silnik jest wyrażana wzorem:
W = F * d
gdzie:
d - odległość na jaką silnik przeniósł daną masę,
n - liczba obrotów,
d = n * 2 * π * r
Praca może być wyrażona również jako iloczyn mocy i czasu:
W = P * t
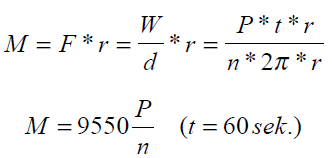
Na podstawie powyższych wzorów można obliczyć moment.
Wyżej przedstawiony wzór przedstawia zależność między prędkością n [obr/min], momentem M [Nm] oraz mocą silnika P [kW]. Dzięki powyższym wzorom na n, M i P można przedstawić prędkość, moment i moc w jednostkach względnych nr, Mr i Pr. Dzięki temu można opisać punkt pracy silnika w stosunku do jego danych znamionowych zgodnie z poniższymi wzorami:
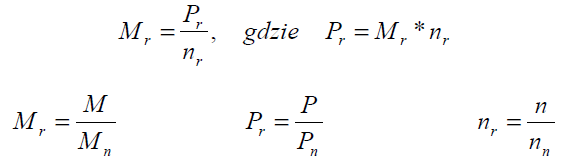
Przy obliczeniach w jednostkach względnych nie występuje stała wartość liczbowa 9550.
Obciążenie = 15% wartości znamionowej, prędkość = 50% wartości znamionowej. Moc =7,5% mocy znamionowej, wtedy moc w jednostkach względnych można wyznaczyć jako:
Pr = 0,15 * 0,50 = 0,075
W zakresie normalnej pracy silnika występują dwa zakresy hamowania.
Charakterystyki przebiegu prądu i momentu silnika asynchronicznego:
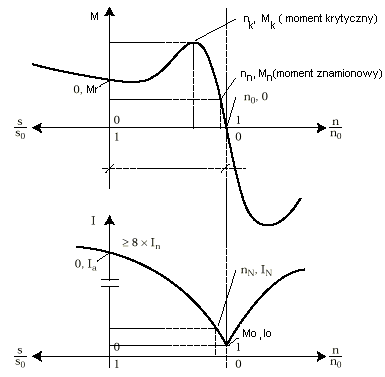
W przedziale n/no>1, gdzie wał silnika obraca się z prędkością powyżej prędkości synchronicznej silnik działa jak generator – tworząc przeciwny moment hamujący i oddając w tym czasie energię do sieci zasilania.
W przedziale prędkości silnika n/no < 0, nazywanym przedziałem hamowania regeneratywnego, można również oddawać energię do sieci zasilania. Jeżeli zamienimy dwie fazy silnika pole wirujące zmienia swój kierunek. W chwilę po tym, współczynnik prędkości n/no będzie równy 1.
Silnik poprzednio obciążony z momentem M, teraz hamuje z momentem hamującym. Jeżeli silnik nie zostaje odłączony od zasilania przy n = 0, to będzie on dalej obracał się, ale w przeciwnym kierunku w związku ze zmianą kierunku wirowania pola magnetycznego.
Silnik pracuje w swoim normalnym stanie pracy jeśli: 0 < n/n0 < 1. Stan pracy silnika może być podzielony na dwie zakresy. Zakres rozruchu: 0 < n/n0 < nk/n0 , i zakres pracy normalnej: nk/n0 < n/n0 < 1
Są to najbardziej istotne zakresy prędkości podczas pracy silnika:
Silnik pobiera energię elektryczną sieci zasilającej. Przy stałym obciążeniu, pobór mocy z sieci zasilającej jest większy niż oddawanie mocy mechanicznej na wale silnika, powoduje to powstawanie strat i obniżenie sprawności silnika. Zależność między mocą na wejściu i mocą na wyjściu jest nazywana sprawnością silnika η.
![]()
Typowa sprawność silnika zawiera między w przedziale 0,7 a 0,9 zależnie od mocy silnika i liczby biegunów.
Rodzaje strat w silniku:
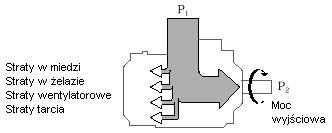
Wyróżniamy cztery główne rodzaje strat w silniku – straty w miedzi, straty w żelazie, straty wentylatorowe i straty tarcia:
Straty histerezowe występują podczas magnesowania rdzenia prądem przemiennym. Przy częstotliwości 50 Hz rdzeń jest magnesowany i rozmagnesowywany 100 razy na sekundę. Magnesowanie i rozmagnesowywanie wymaga zużycia pewnej ilości energii, która wzrasta wraz z częstotliwością napięcia zasilania i indukcją magnetyczną.
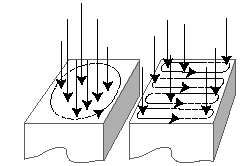
Straty od prądów wirowych powstają, ponieważ pole magnetyczne indukuje siły elektromotoryczne w rdzeniu i przewodach. Siły te powodują przepływ prądów wirowych wzdłuż linii sił pola magnetycznego powodując nagrzewanie się silnika. Poprzez wykonanie rdzenia z cienkich blach straty od prądów wirowych można znacznie zmniejszyć.
Ograniczenie wpływu prądów wirowych poprzez budowę rdzenia z cienkich połączonych ze sobą blach:
Straty silnika są wyznaczane dla znamionowej wartości prądu silnika, pomiary strat w stanie zwarcia określają straty w miedzi, a przy pracy jałowej określają straty w żelazie.
Silnik jest projektowany na odpowiednie napięcie i częstotliwość zasilania, więc magnesowanie silnika zależy od stosunku między napięciem i częstotliwością.
Jeżeli stosunek napięcie / częstotliwość wzrasta, to silnik jest przemagnesowany, jeżeli stosunek ten zmniejsza się, silnik jest niedomagnesowany. Pole magnetyczne w niedomagnesowanym silniku jest osłabione i moment, który silnik jest w stanie wytworzyć jest zmniejszany, może wtedy wystąpić sytuacja, że wirnik silnika nie będzie się obracał, lub czas rozruchu może być wydłużony, co doprowadzi do przeciążenia silnika.
Silnik przemagnesowany pracuje tak jakby był przeciążony. Moc zużyta na przemagnesowanie powoduje przegrzewanie się silnika i może uszkodzić izolację. Jednakże, trójfazowe silniki prądu przemiennego, a w szczególności silniki asynchroniczne są bardzo odporne na przemagnesowywanie. Tylko proces długiego przemagnesowywania przy pracy ciągłej jest w stanie go zniszczyć.
Sposobem na określenie nieprawidłowego namagnesowania silnika jest ocena jego pracy. Prędkość silnika wskazuje czy proces magnesowania silnika jest dobry. Jeżeli prędkość nie jest stała przy zmianach obciążenia, następują wahania prędkości lub szarpania, świadczyć to może o nieprawidłowym magnesowaniu silnika.
Zasadniczo silniki asynchroniczne składają się z sześciu uzwojeń: trzy uzwojenia w stojanie i trzy uzwojenia w wirniku - zwarta klatka wirnika pod względem magnetycznym jest równoważna trzem uzwojeniom. Analizując układ uzwojeń możliwe jest sporządzenie elektrycznego schematu zastępczego, który ilustruje zasadę działania silnika.
Rozkład uzwojeń wirnika i stojana:

Schemat zastępczy silnika jednofazowego sprowadzony do fazy L1:
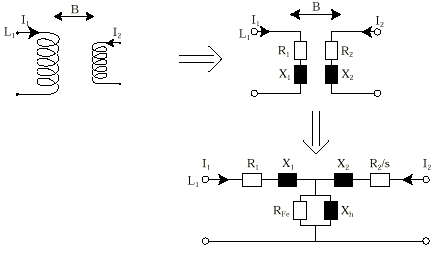
Uzwojenie stojana posiada nie tylko rezystancję, ale i reaktancję wyrażoną w omach [Ω]. Prąd płynący w uzwojeniu zależy od częstotliwości f napięcia zasilania:
XL = 2 * π * f * L
gdzie:
f - częstotliwość zależna od prędkości kątowej ω [Hz].
L - indukcyjność uzwojenia wyrażona w [H].
Uzwojenia stojana i wirnika są sprzężone magnetycznie. Uzwojenie wirnika generuje prąd w stojanie i odwrotnie, rys. 14b. Ten wzajemny wpływ oznacza, że dwa elektryczne obwody mogą być połączone za pomocą jednego wspólnego. Obwód wspólny składa się z rezystancji wzajemnej RFe i reaktancji wzajemnej Xh, przez który przepływa prąd magnesowania stojana i wirnika. Napięcie występujące na rezystancji RFe i reaktancji Xh nazywane jest napięciem magnesowania.
Do tej pory rozważaliśmy przypadek, gdzie silnik pracował bez obciążenia. Kiedy silnik pracuje w zakresie jego normalnej pracy, częstotliwość wirowania wirnika jest niższa niż częstotliwość pola wirującego i X2 jest zmniejszony przez poślizg s.
W elektrycznym schemacie zastępczym, efekt ten jest opisany przez zmianę rezystancji wirnika R2 przez współczynnik 1/s.
R2/s możemy zapisać jako: R2+(R2*(1-s)/s) gdzie: R2*(1-s)/s) - jest mechanicznym obciążeniem silnika.
Wartości R2 i X2 odnoszą się do wirnika. R2 jest przyczyną strat cieplnych silnika przy obciążeniu.
Schemat zastępczy silnika pod obciążeniem:
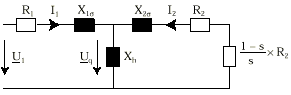
Poślizg jest bliski zeru, gdy silnik pracuje bez obciążenia. To oznacza, że zmniejsza się R2*(1-s)/s).
W wyniku tego w obwodzie wirnika praktycznie nie popłynie żaden prąd. W idealnym przypadku jest to sytuacja, gdy rezystancja R2 (przedstawiająca obciążenie mechaniczne) jest równa zero.
Kiedy silnik jest obciążony poślizg zwiększa się zmniejszając R2*(1-s)/s. Wraz ze wzrostem obciążenia prąd I2 w wirniku też wzrasta.
Schemat zastępczy dla biegu jałowego silnika oraz stanu zwarcia:
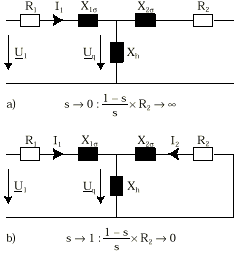
Przy pomocy przedstawionego elektrycznego schematu zastępczego można analizować pracę silnika w różnych warunkach w większości przypadków.
Istnieje tutaj niebezpieczeństwo, że napięcie samoindukcji (Uq) może osiągnąć wartość napięcia zasilania. Wynika to stąd, że zastosowano schemat uproszczony dla łatwiejszej analizy pracy silnika w różnych warunkach. Jednakże sytuacja taka ma miejsce tylko w przypadku, gdy silnik jest nieobciążony.
Jeżeli wzrasta obciążenie to wzrasta prąd I2, a stąd i prąd I1 – w wyniku tego zwiększony spadek napięcia musi być uwzględniany. Jest to szczególnie ważne wtedy, gdy silnik jest zasilany przez przemiennik częstotliwości.
źródło: Dr inż. Jerzy Szymański, ELPOL Centrum Elektroniki i Automatyki Sp. z o.o. (www.elpol.biz)
 Zarejestruj się
Zarejestruj się
 Nasz blog o falownikach
Nasz blog o falownikach Znajdź nas na Twitter
Znajdź nas na Twitter Znajdź nas na Facebook
Znajdź nas na Facebook Odwiedź nas na Google+
Odwiedź nas na Google+